

加速度传感器测的是什么?
我觉得很多时候大家都被它的名字给误导了我觉得准确的来说它测的不是加速度至少对于mma7260这类的片子 它检测的是它受到的惯性力(包括重力!重力也是惯性力)。那又有人要问了F=ma 惯性力不就是加速度么? 差矣 加速度传感器实际上是用MEMS技术检测惯性力造成的微小形变 注意 检测的是微小形变 所以你把加速度传感器水平静止放在桌子上 它的Z轴输出的是1g的加速度 因为它Z轴方向被重力向下拉出了一个形变可是你绝对不会认为它在以1g的加速度往下落吧你如果让它做自由落体它的Z轴输出应该是0 给个形象的说法可以把它看成是一块弹弹胶它检测的就是自己在三个方向被外力作用造成的形变。从刚才的分析可以发现重力这个东西实际是个很恶心的东西它能隔空打牛,在不产生加速度的情况下对加速度传感器造成形变,在产生加速度的时候不造成形变,而其他力都做不到。可惜的是,加速度传感器不会区分重力加速度与外力加速度。
所以,当系统在三维空间做变速运动时,它的输出就不正确了 或者说 它的输出不能表明物体的姿态和运动状态举个例子当一个物体在空间做自由落体时 在X轴受到一个外力作用 产生g的加速度 这时候x y z 轴的输出分别是g,0,0 如果这个物体被x轴朝下静止放在水平面上 它x y z轴的输出也分别是 g,0,0 所以说 只靠加速度传感器 来估计自己的姿态 是 很危险而不可取的
加速度传感器有什么用?
加速度计,可以测量加速度,包括重力加速度,于是在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与刚才所说的R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面 与 地面 的角度关系也就是横滚角和俯仰角 计算公示如下 俯仰角 横滚角
陀螺仪测的是什么?
陀螺仪可以测量角速度,具有高动态特性,但是它是一个间接测量器件,它测量的是角度的导数,角速度,显然我们要将角速度对时间积分才能得到角度看到积分 我想敏感的同学马上就能发现一个致命的问题 积分误差
积分误差的来源 主要有两个 一个是积分时间 积分时间Dt越小,输出角度越准 一个是器件本身的误差 假设陀螺仪固定不动,理想角速度值是0dps(degree persecond),但是有一个偏置0.1dps加在上面,于是测量出来是0.1dps,积分一秒之后,得到的角度是0.1度,1分钟之后是6度,还能忍受,一小时之后是360度,转了一圈所以说 陀螺仪在短时间内有很大的参考价值
陀螺仪另外一个问题是它的测量基准是自身,并没有系统外的绝对参照物重力轴是个绝好的参照物因此需要陀螺仪和加速度传感器的配合使用 如果要测偏航角YAW还需要电子罗盘感知地磁方向给出水平方向的绝对参考(当然这个在智能车上不存在吧······——!)
陀螺仪和加速度传感器的融合
除了给出绝对参考系陀螺仪和加速度传感器相互融合使用的最重要的原因是:
综合考虑,加速度计是极易受外部干扰的传感器,但是测量值随时间的变化相对较小。陀螺仪可以积分得到角度关系,动态性能好,受外部干扰小,但测量值随时间变化比较大。可以看出,它们优缺点互补,结合起来才能有好的效果
用通俗点的话来说 就是无论工作多久 加速度传感器如果没收到外部干扰 它测的就一定是准的!陀螺仪虽不会受到外部干扰可是时间长了 由于积分误差累计 它的值就全错了!
所以两个数据融合的方法就是设计算法在短时间尺度内增加陀螺仪的权值,在更长时间尺度内增加加速度权值,这样系统输出角度就更真实了
再通俗点说 就是 隔一段时间 用加速度传感器的值修正一下陀螺仪的积分误差 然后在隔的这段时间内 用陀螺仪本身的角度积分
其实MK四轴的平衡算法也是这样,首先对陀螺仪做PI运算,其中I的真正含义就是积分反演角度
有了陀螺仪PI算法,四轴就有了瞬时增稳,就可以遥控飞了,但是它不会永远水平
由于累积误差的作用,很快中立点就不是水平位置了,这时候就需要用加速度不断的纠正陀螺仪积分误差。
你可以看到MK算法中有根据加速度方向不断把积分量I递减清零的代码,就是这个融合算法的核心了
MK立足于一个高级航模玩具,为了在低成本8位单片机上运行,不去显式的计算姿态角,只把校正后的PI值输出负反馈控制电机了
这样的好处是基本上只用整型算法就能完成运算,而要显式的计算姿态角,更专业的做法就是KALMAN滤波显式求解姿态
卡曼滤波也是在对历史数据积分,并且可以同步融合陀螺仪与加速度数据,陀螺仪与加速度贡献权值还可以通过滤波参数调整
所以它就成了惯性数据处理的经典算法,他的缺点是浮点运算量较大,对系统资源要求较高
至于具体的KALMAN滤波算法 网上大把大把的 这里就不多赘述了
总结一下就是:
PITCH/ROLL角速度积分->PITCH/ROLL姿态角,再结合加速度纠正累积误差
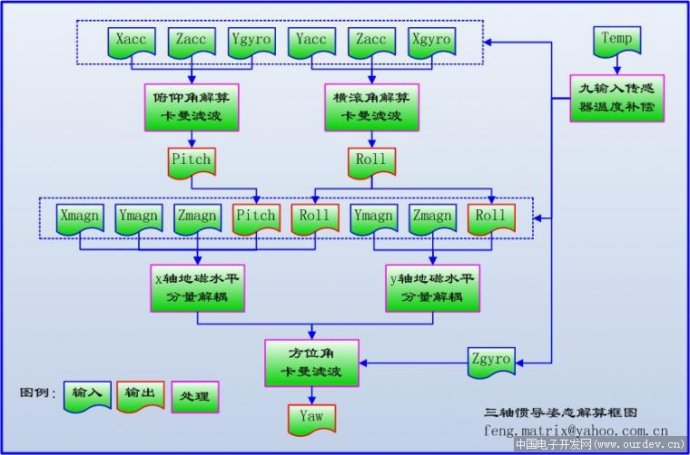
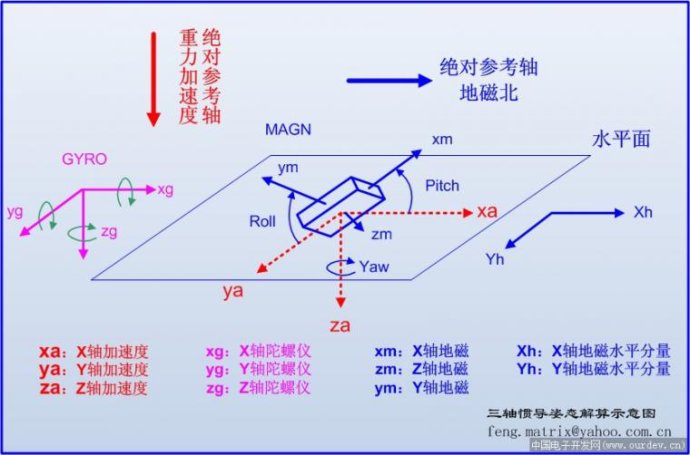
发两张四轴论坛上feng_matrix大侠发的两张图
最后说一下自己以前在做四轴时碰到的问题
1 数据类型非常重要 很多时候精度误差计算都错在数据类型 小数点上 尤其是AD值(int)往电压值 角度值(float)转换时 一定要注意!
2 一定要注意陀螺仪的积分时间!!一定要注意 搞清楚自己程序里陀螺仪值的积分时间 看清数据手册中的电压值和角速度的关系千万不要搞错仔细仔细再仔细
3 EN-03这个片子我没用过 主要当时考虑性能实在太········但既然组委会规定了 大家就好好适应毕竟都在一个平台上了但是印象中这款片子输出值很小 好像使用上都是借个运放 还有 一定要注意温漂!!陀螺仪上的温漂太可怕了EN-03有没有温度反馈脚记不得了·······如果有 大家一定要用上如果没有想想办法怎么解决温漂吧·····
最后 祝新一届的小弟们能在第七届里取得好成绩!
解决加低通滤波器的陀螺仪的过冲问题?
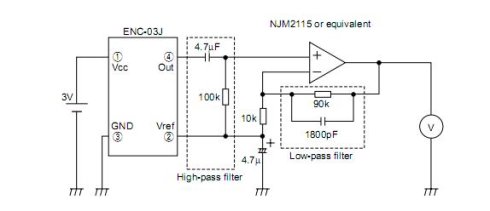
如下图,外力使陀螺仪板某一轴转动90度后停止,输出波形采样显示有一个反向的,幅度约为正向1/3的“反冲”
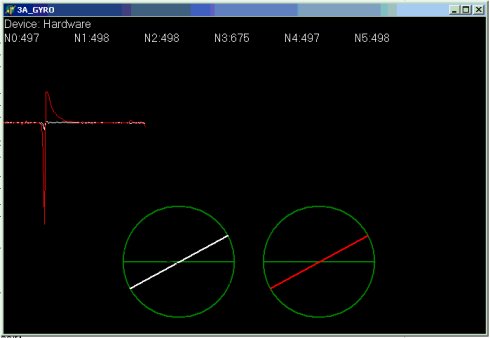
这个问题目前试验了两种解决方法:
方法1:去掉4.7u电容与100k电阻组成的滤波器,“反冲”情况改善,但带来一个问题,ENC-03的输出一旦直连运放,温漂就很大
注意,ENC-03直连运放时,运放要选择阻抗较高的场效应管输入类,比如德国人用的TS914或者替代品TLC274,最好不要用LM324
方法2:
增加滤波电路中电容容量,容量越大反冲幅度越小,持续时间更长,经过试验并联一个20u与一个4.7u电容后,波形变成:

贴片大电容可取自废旧硬盘电路板上,硬盘电路为保证可靠性,退耦电容极多
选三个个头最大的贴片就成,但注意不要选电解电容
评论 (0)